Multi-Camera, Multi-Person Detection
People
Scott Spurlock Richard Souvenir
Overview
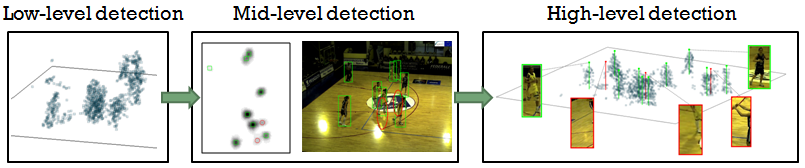
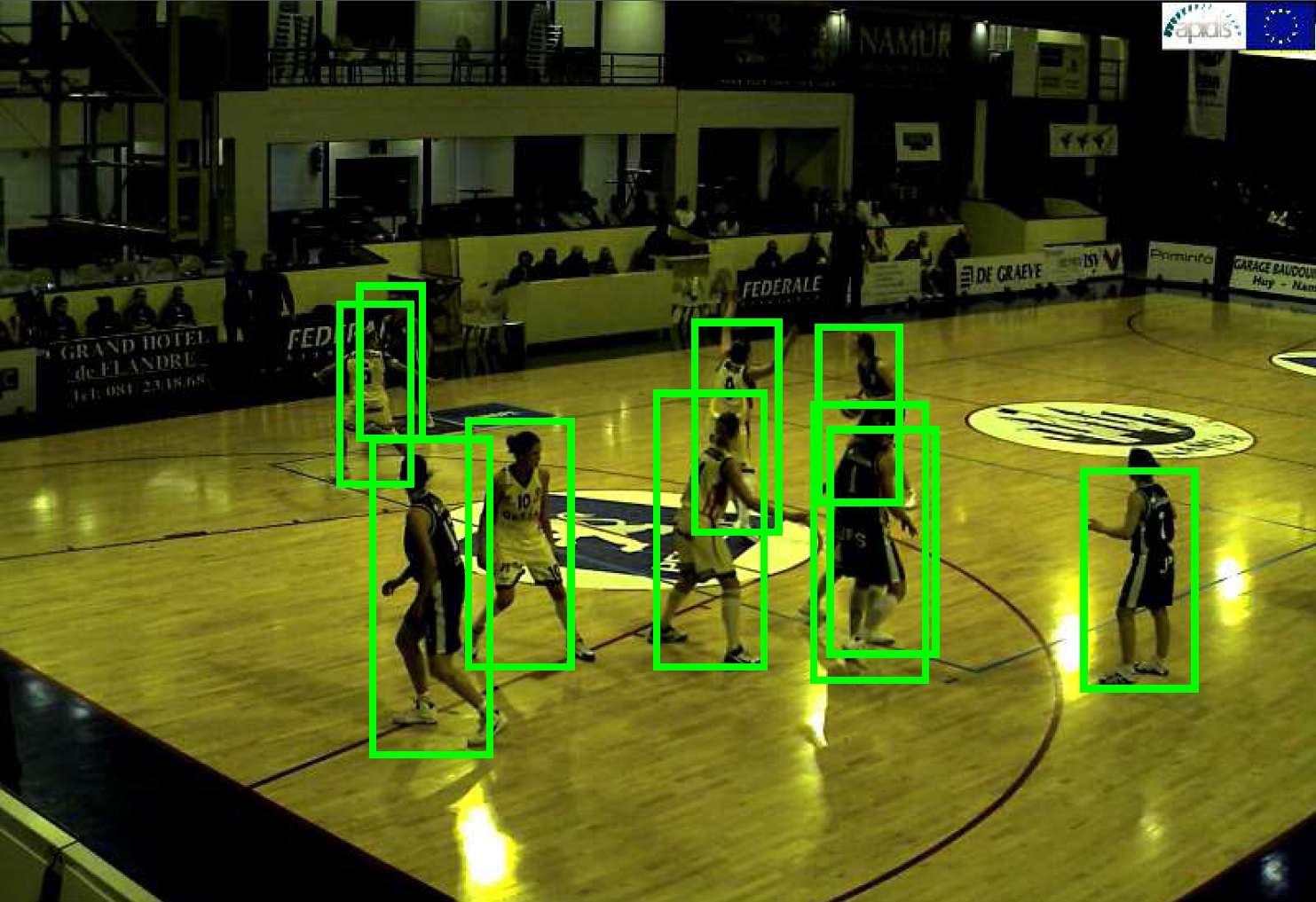
In this project, we introduce an approach to multi-camera, multi-object detection that builds on low-level object localization with the targeted use of high-level pedestrian detectors. Low-level detectors often identify a small number of candidate locations, but suffer from false positives. We introduce a method of pedestrian verification, which takes advantage of geometric and scene information to (1) drastically reduce the search space in both the spatial and scale domains, and (2) select the camera(s) with the highest likelihood of providing accurate high-level detection. The proposed framework is modular and can incorporate a variety of existing detection methods. Compared to recent methods on a benchmark dataset, our method improves detection performance by 2.4%, while processing more than twice as fast.
Citation
Scott Spurlock and Richard Souvenir. Pedestrian Verification for Multi-Camera Detection. In Asian Conference on Computer Vision (ACCV), 2014.